Phantom-Omni-Project
Haptic / Force-Feedback Interface with OMNI Phantom for Robot Guidance
Introduction
This project presents a software application for medical intention. It consists of a three dimensional virtual environment created in Unity, which are graphical scenarios in which the user interacts in real time using sensory devices for vision and sense of movement. The virtual environment allows haptic devices such as the Phantom Omni, a device with peripheral input and output that allow user to interact with our virtual environment, to simulate the sensation corresponding to the touch for which forces return.
Methodology
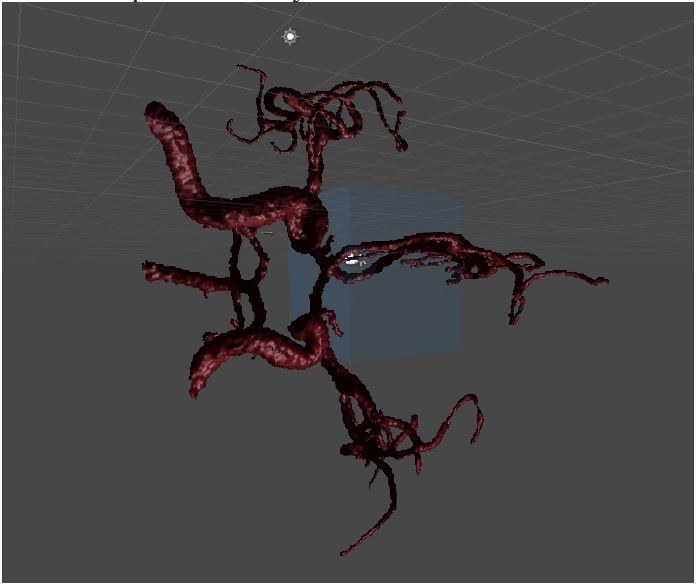
Equipment and software necessary: Phantom Omni Haptic Device, Unity, C#, OpenGL Phantom Omni interface acts as a bidirectional communication device between the user and the object in the virtual environment. This interface allows the user to navigate through a virtual tube (blood vessel), and perceive reaction forces depending whether or not there is contact between the haptic cursor (the pill) and the tube. The user must move an object through a three-dimensional tube. When the object comes into contact with one of the walls of the tube, the user perceives the corresponding collision force through the haptic device. The magnitude of the reaction force is proportional to the level of the surface intact of the pill within the wall of the tube. The Phantom Omni device contains a rotating base attached with some joints and has 6 degree of freedom that allow user to indicate the position and orientation of the haptic cursor within our virtual environment. With the addition of OpenGL haptic plugin that connects the Phantom to the computer, we’re able to interface the device to unity. Scripts written in C# allows the user to manipulate objects, set restraints, boundaries, and force feedback.
Results
The proposed method was tested for haptic feedback when the pill comes in contact with the outer walls of the artery. -Complete workspace of artery:
When starting the executable file, the expected result includes controlling the pill in the free space with the haptic device. Sample image of the pill moving in free space until it enters the bounded tube:
Once inside the tube, the pill is enabled to traverse through it while being restricted within the bounds providing haptic feedback to the Omni.

Sample image of the pill traversing through the tube If there is visual contact between the pill and the artery boundaries, the haptic device will provide force feedback in order to guide the pill back onto it’s traversal path.
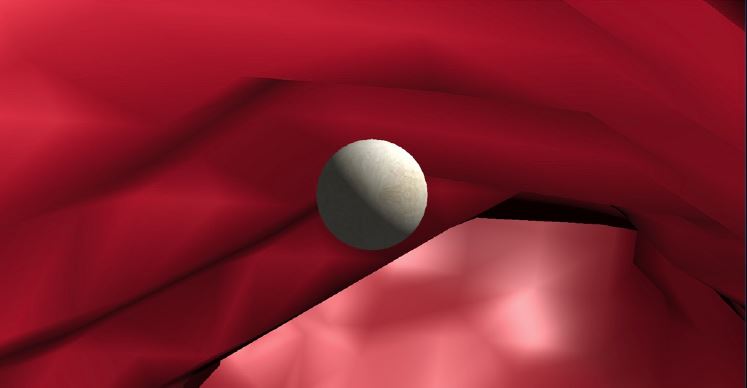
Sample image of contact with boundaries producing force feedback.
Limitation
The plugin did not allow access to raw data from the haptic device. The data provided limited the ability to integrate the separate workspaces of the haptic and Unity dynamically.
YouTube link to demo: https://youtu.be/DoSwg3S898E
Conclusion
In this project, the Phantom Omni haptic device demonstrated force feedback by interfacing along a Unity Scenario with descriptive components developed by C# scripts. The proposed result aligned with the project’s expectations by providing the correct feedback when the pill collided with the artery tube. Thus, handling feedback by guiding the tube safely back to its traversal path. By allowing the haptic device to calculate the precise and accurate measurements of the procedure, it increases the chances of a successful operation. This demonstration supports the technological medical movement by providing hands-off and minimal error procedures. With the advancement of robotic technology, more tasks using haptic feedback are being performed by robots to reduce execution time and minimize human mistakes, such as errors caused by negligence and/or exhaustion.