
Arduino Tinkerkit Braccio IK For Unity
Braccio robotic arm simulator with IK (inverse kinematics) and controller via Serial in Unity.
Hardware
Arduino Tinkerkit Braccio
BraccioIKUnity
Unity project developed with Unity 5.3.4.
- Turn on Serial settings in Unity: Menu Edit > Project Settings > Player > Settings for PC … Standalone Tab Other Settings > Api Compatibility Level > Choose .NET 2.0
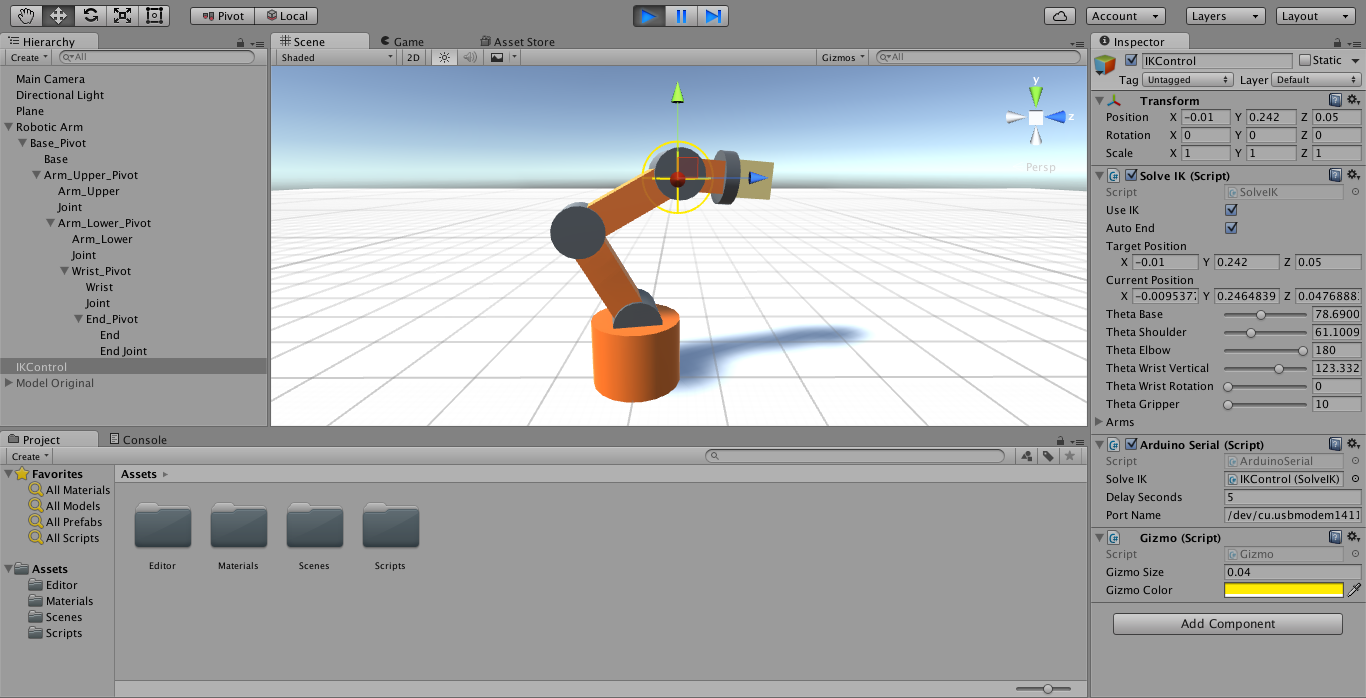
- Open scene
Assets/Scenes/BraccioIK.unity - GameObject IKControl:
- Transform: Move the Position to change robotic arm wrist IK target position.
- Solve IK:
- Toggle Use IK on to control the robotic arm with IK. (Theta Base, Theta Shoulder, Theta Elbow)
- Toggle Auto End on to automatically turn the end pose horizontally. (Theta Wrist Vertical)
- Arduino Serial: Send motor angles every 5 seconds (Delay Seconds) to Serial. Change Port Name before use. Default off.
- Gizmo: Visualize target position.
BraccioSerialArduino
Arduino counterpart code which receives commands from Unity. Need to have Braccio library installed.
Authors
BraccioIK.unity / SolveIK.cs: Shan-Yuan Teng [email protected]
BraccioSerialArduino.ino: Yung-Ta Lin
License
MIT