
Delft AI Toolkit
Visual Authoring for AI Prototyping
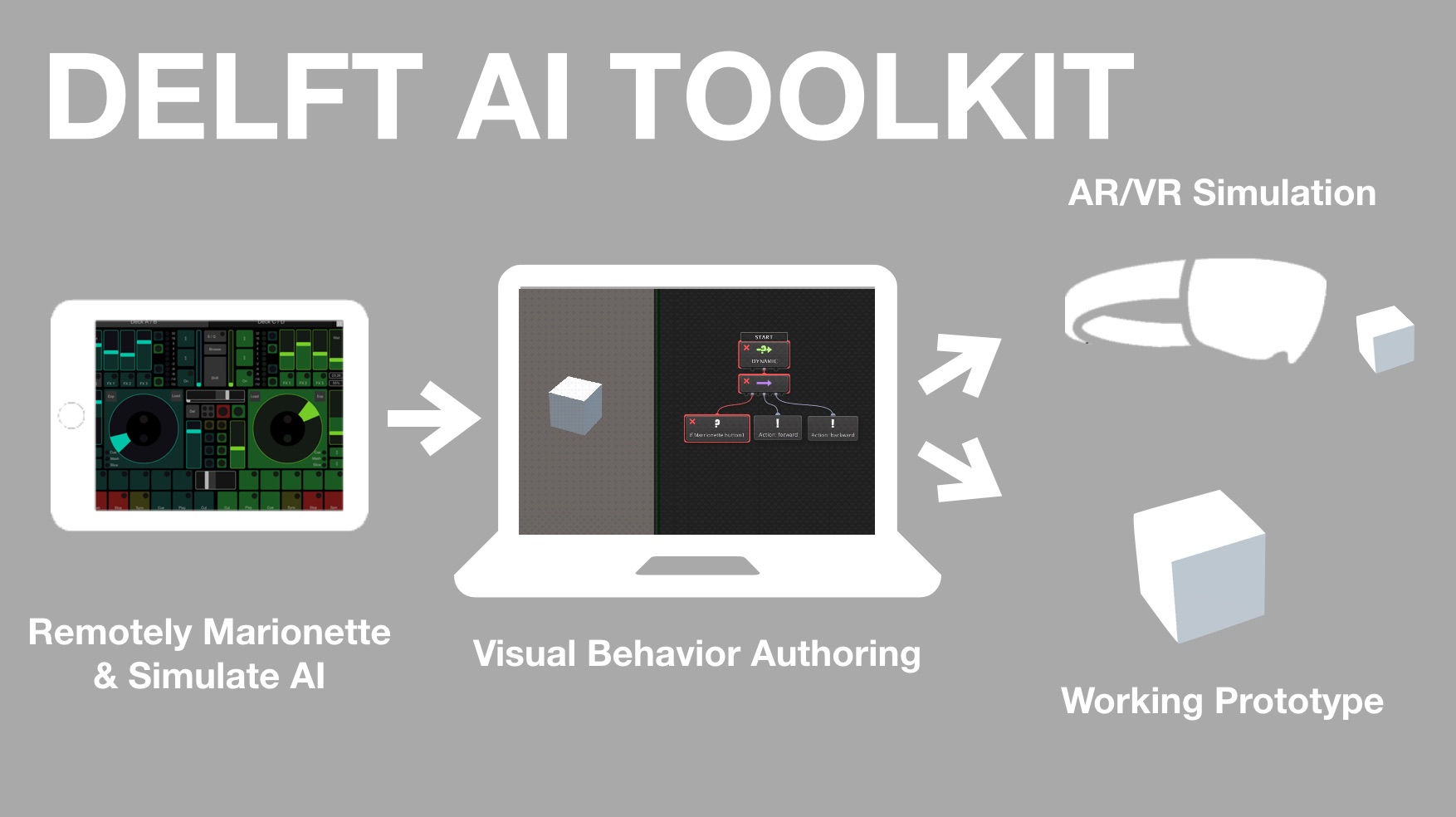
The Delft AI Toolkit (DAI-TK) is a system for designing and researching smart things. It provides a visual authoring environment that simplifies the use of machine learning, cognitive APIs, and other AI approaches. The node-and-connection visual graphs combine the advantages of behavior trees and dataflow models to create smart behavior in autonomous devices.
DAI-TK enables quick prototyping, experimentation and iteration of AI interactions with powerful nodes that support behavioral sequences, sensing, decision making, state management, and the simple invocation of AI techniques such as speech to text, text to speech, and visual object recognition.
In addition, it encourages design strategies that start with simulation and smoothly progress toward a working prototypes of machine learning and hardware.
-
Marionetting - This approach allows the designer/researcher to control the smart thing in real time, responding to people and other contexts as if they were the AI being designed (e.g. reacting to user interactions by triggering voice responses or movements as it they were coming from an AI system). This remote control can happen wirelessly (e.g. using a tablet or phone), and provide a rapid feedback loop from testing to design.
-
3D/AR simulation - Because hardware design and implementation can be time consuming, DAI-TK simulates the smart thing in 3D within Unity3D. This allows the designer/researcher to iteratively experiment with different approaches prior to committing to a particular hardware approach. In a future version of DAI-TK, designers will be able to place the smart thing 3D simulation in the real world through AR, as well as add AR augmentations of the smart thing.
- Video Introduction
- Description
- Documents
- System Components
- Current Features
- Roadmap
- System Architecture
- Getting Started
Video Introduction
Description
The Delft AI Toolkit a system for designing smart things. It provides a visual authoring environment that incorporates machine learning, cognitive APIs, and other AI approaches, behavior trees, and data flow to create smart behavior in autonomous devices.
The goal of this project is to develop an approach to authoring AI that enables designers to easily and iteratively prototype smart things. This approach includes the ability to Wizard-of-Oz AI behaviors and simulate physical hardware in 3D, and then migrate these simulations to working prototypes that use machine learning and real hardware.
Documents
System Components
- Authoring & Control System running on a computer
- Visual Authoring with nodes in the Unity3D authoring environment
- Robot/Device
- Raspberry Pi + Arduino (we may transition to the Adafruit Crikit for RPi once we have a chance to evaluate it - this would eliminate the need for the Arduino)
- Motors, servos, sensors, LEDs, microphone, speaker, camera, etc.
Each of these has a codebase, and includes a range of open source libraries.
This system also uses xNode, which is being enhanced by Siccity as part of this project.
Current Features
- Action Types - text2speech, speech2text, camera based object recognition, position servos, move wheels, leds
- Action Options - repeat, random
- Machine Learning - performs object recognition onboard the RPi, and allows model selection (Squeezenet, Alexnet, Googlenet, Inception, Rcnn). Speeds range from 0.6secs to 2.0secs
- Inputs - analog sensors, keyboard, OSC
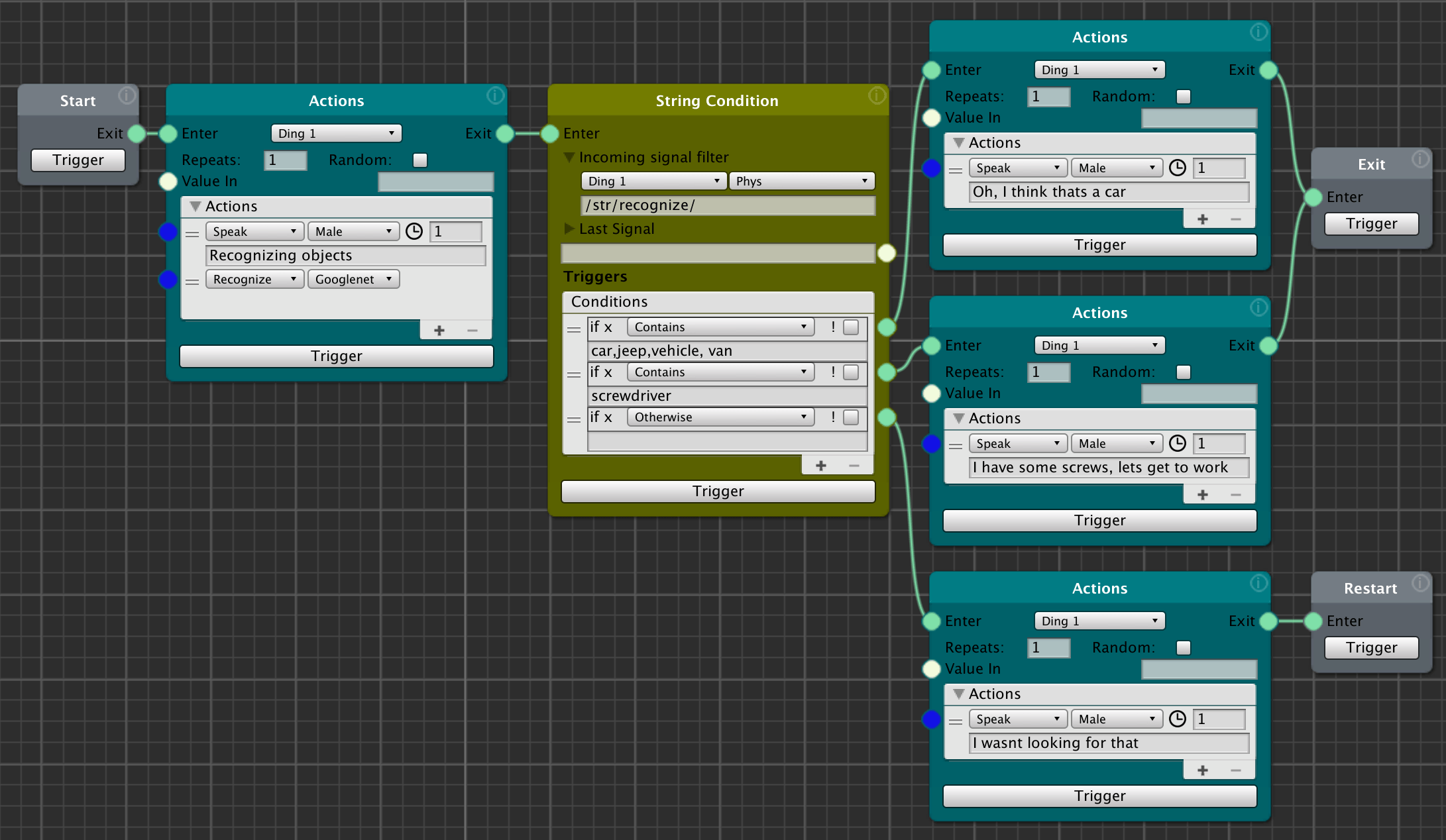
- Conditions - numeric gt/lt/range, string start/end/contains/multiple
- Behavior Trees/Data Flow - multiple node ins/outs, loops, restart, individual node trigger for testing, visual indication of active node and action within node
 ## Roadmap
## Roadmap
- More video and written documentation
- More and simpler hardware configurations
- Add support for IBM Watson AI Cognitive Services (e.g. Assistant, Speech2Text, Text2Speech, Emotion, Sentiment, etc.)
- Add support for Snip.ai – edge based speech assistant
- Better support for IoT (e.g. IFTTT, webhooks)
- Integrate gesture recognition learning and classification
- Integrate Unity Reinforcement learning
System Architecture
Hardware
The physical robot is currently based on a simple robot platform from Adafruit, combined with a Raspberry Pi to perform the local edge AI, local text-to-speech, and make use of cloud APIs. The RPi talks over serial to an Arduino with a motor hat for the DC motors and Servos. The robot RPi communicates with Unity on the computer with the OSC network protocol.
Note: The next hardware version planned will eliminate the Arduino and replace it with the Adafruit Crickit Hat for the RPi. This will simplify hardware and software, and make a more compact robot.
Raspberry Pi Disk Image
Getting Started
Starting the System Up
-
Power the Robot: Power on the Arduino and Raspberry Pi (RPi) in the following order:
- Motors: Turn on the 6V AA battery pack (you can leave this off to disable the servos and wheel motors, or to save the batteries. The robot will work fine other than the motors)
- Arduino Powered by the USB cable from the RPi
- RPi: Connect a 5V 2A AC adapter, or the USB battery to the micro USB connector
-
Get the WiFi IP address of the Robot
- Your RPI must already connect by WiFi - If you haven’t already, set up your RPI to connect to your local WiFi using an ethernet cable.
- Connect by Ethernet if necessary - Some networks don’t allow connection by the .local (Bonjour) name. If so, hook up an ethernet cable between your computer and the Raspberry Pi (RPi) on the robot (you may need a USB-C adapter
- Login to the RPi - Open a terminal window on your computer, and log into the RPi by typing in the below. Change the number at the end of delftbt0 to match the number of your robot if you changed the name.
ssh [email protected]- Password - The default password for the standard Delft AI Toolkit disk image is “adventures”
- Get the RPi WiFi IP Address - Once logged in, copy and save the IP address of the RPi by typing the below. You’ll see an entry for “wlan0” which is the WiFi connection - from there copy the IP address (e.g. 10.4.27.47)
ifconfig- Logout - of the RPI by typing
exit- Disconnect - Unplug the ethernet cable
-
Start the Delft Toolkit software on the RPi
- Power Motors - If you are using the motors, turn on the 6V battery pack (or save the batteries for now, and turn the battery pack on when you are ready)
- Login to RPi - In the terminal app log in to the RPi over WiFi by typing:
ssh [email protected] # replace this IP address with the one you got from ifconfig above- Toolkit Dirctory - Once logged in, change directory to the delft-ai-toolkit directory:
cd delft-ai-toolkit- Start the software - Type the below command, putting the IP address of your computer at the end for --server_ip (get the IP address of your computer by opening Network Preferences)
python3 delft_toolkit.py --server_ip 10.4.18.109-
Startup Sequence - The software will take a little time to start up. When it finishes, the robot will say “Hello.”
-
IMPORTANT: Powering off the RPi Procedure: Before you disconnect the power from the RPi, you must properly shut it down with the following command. Wait for 10 seconds after the poweroff command, then it is safe to unplug the power from the RPi.
sudo poweroff -
Start the software running in Unity
- Open Project - Open the “delft-toolkit” project in Unity3D (we’ve tested in version 2018.2.x)
- Open Scene - In the Project, open the the scene that matches the toolkit graph you are using (e.g. Assets>Scenes>MainExamples)
- Open Visual Graph - In the Project Assets>DelftToolkitGraphs directory, double click on the toolkit visual graph you are currently using (e.g. Assets>DelftToolkitGraphs>MainExamples)
- Physcial Robot - If you are using the physical robot (the toolkit will work fine without the robot)
- Click on the simulated robot in the Hierarchy (e.g. ding1), and in the inspector, be sure the “Ding Control Physical” script is enabled.
- Still in the inspector at the “Ding Control Physical” script, paste in the IP address of the robot where it says “Target Addr”
-
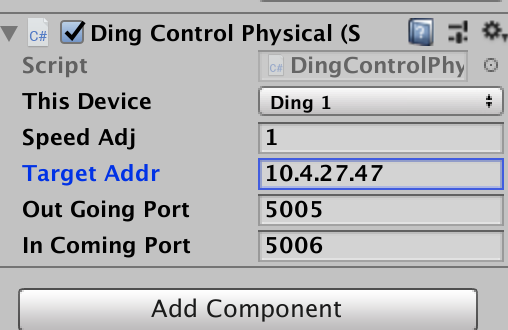
- If you are not using the physical robot, leave the IP address at 127.0.0.1
- Play - Click on the Unity Play button
- Start Graph - In the xNode Toolkit graph pane, click on the “Start” node Trigger button to run the whole graph, or use Trigger on any individual node
- For keyboard or OSC - Click on the Game pane (this is to ensure Unity is receiving all commands – if you find it is not responding to the keyboard or OSC, click this pane)
Robot Command Line Essentials
# login to the RPi via ethernet
ssh [email protected]
# get the IP address of the RPi from the wlan0 section
ifconfig
# login to the RPi via WiFi, change the example IP to that RPi
ssh [email protected]
# change to the toolkit software directory
cd delft-ai-toolkit
# start the RPi software, change the example IP to that of the computer running Unity
python3 delft_toolkit.py --server_ip 10.4.18.109
# shutdown before disconnecting the power, then wait for 10 seconds
sudo poweroff
Installing The Software
See installation instructions on the hardware documentation page